





들어가며
미국에서 자율주행자동차가 보행자를 치어 숨지는 사건이 발생했다. 지난 3월 18일 오후 10시 경, 미국 애리조나 주 피닉스 교외의 한 교차로에서 우버의 자율주행자동차가 자전거를 끌고 무단횡단을 하던 49세 여성 보행자를 충돌한 사고이다.
앞서 테슬라 자동차도 자율주행모드에서 사고가 발생해 운전자가 사망한 사례가 있었지만, 자율주행자동차에 의한 보행자 사망사고는 이번이 처음이다. 우버는 미국 전역에서 진행하던 자율주행자동차 시험운행을 전면 중단하겠다고 밝혔고, 도요타도 미국에서 실시 중인 자율주행자동차의 일반도로 주행시험을 일시 중단한다고 선언하였다.
한편 미국 의회에서는 즉각 자율주행 기술을 상대로 규제를 강화해야 한다는 의견을 제시하면서 그간 자율주행자동차 관련 규제 완화 기류에 정면으로 제동을 걸고 나섰다. 인류에게 궁극적인 안전함과 편리함을 주기 위해서 개발되고 있는 자율주행자동차가 정작 그 본연의 목적과는 정반대의 사고로 중대한 고비를 맞고 있는 상황이다. 현재 미국을 포함한 세계 각국 정부에서는 자율주행자동차의 기술개발을 산업계에 맡기고 정부는 상용화 촉진을 위한 지원에 집중하고 있는 추세이다. 그러나 국민의 재산과 생명을 보호하기 위한 안전성 확보는 결코 타협의 대상이 될 수 없으며, 안전성 검증을 위한 안전기준 제정이 시급히 요구되는 때이다.
따라서 본 고에서는 자율주행자동차의 안전성 확보 및 검증을 전제로 하는 국제기준 제정을 위한 안전기준 동향을 살펴보고자 한다.
자율주행 기술레벨
자율주행자동차는 특정 자율주행 기술레벨을 갖춘 자동차를 의미한다. 자율주행자동차의 성능과 안전을 확인하기 위해서는 해당 자동차에 장착된 자율주행시스템의 수준을 일정한 잣대로 평가하기 위한 레퍼런스가 필요한데, 이것이 바로 자율주행 기술레벨이다. 자율주행 기술레벨은 미국 연방도로교통안전청(NHTSA)이 레벨0부터 레벨4까지(총 5단계)로 구분하면서 최초로 정의하였다(’13.5). 이후 유럽의 BASt(독일연방도로공단) 및 VDA(독일자동차협회)에서 자율주행의 기능적 정의를 명시하면서 발전(’13.7)하였고, SAE(세계자동차공학회)에서 초안(’14.1) 및 수정안(’16.9)을 통해 제안한 레벨0부터 레벨5까지(총 6계) 세분화된 내용이 현재 국제적으로 통용되고 있다. SAE에서 제안한 자율주행 기술레벨은 비록 민간에서 제안하였지만, 미국 교통부 및 UN에서 공식적으로 반영·채택했기 때문에 의미가 있다.
그러나 SAE International Standard J3016 문서 및 미국의 자율주행자동차 가이드라인에 명시되어 있는 자율주행 기술레벨은 각각의 레벨에 대한 정의와 설명을 나타내는 인포그래픽이 불충분해서 자율주행 기술레벨을 한눈에 정확하게 이해하기에는 많은 어려움이 있다. 또한 자율주행자동차 개발사들이 자사에 유리한 입장으로 제작하여 공개하는 일부 무분별하고 잘못된 정보가 담긴 자료들이 범람하기 시작하였다. 이에 국토교통부는 국민들에게 정확한 사실 전달과 쉽고 명쾌한 이해를 돕기 위하여 한국교통안전공단이 주관기관으로 수행하고 있는 ‘자율주행자동차 차량·운전자 제어권 전환 안전성 평가기술개발 및 사회적 수용성 연구‘ 과제의 일환으로 자율주행 기술레벨 정의에 대한 인포그래픽을 제작 및 공개하였다. 본 인포그래픽은 SAE J3016 문서내용을 기반으로하되, 세부 카테고리와 레벨간의 차이점을 일목요연하게 구분하여 주행 시나리오와 함께 재구성 하고, 레벨과 레벨 차이에 대한 이해를 돕기 위해 제작하였다.
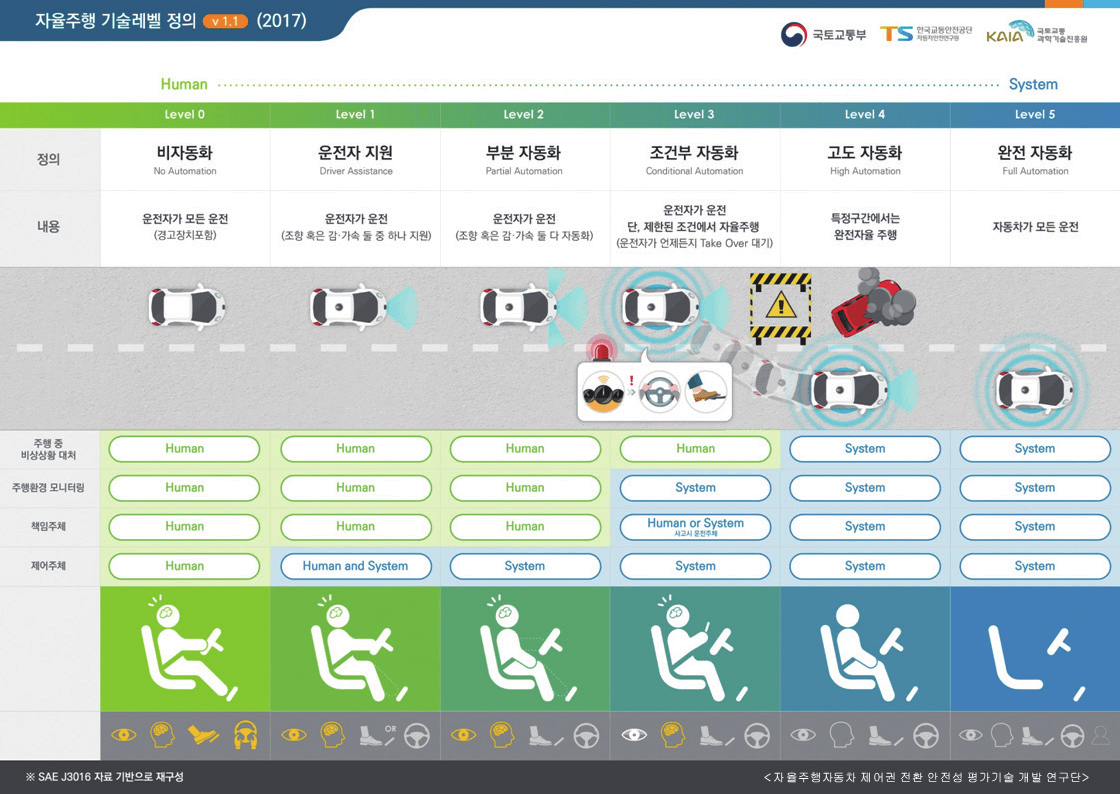
<그림 1> 자율주행 기술레벨 인포그래픽
현재 양산되고 있는 자동차에 장착된 자율주행 기술은 대부분 레벨2 수준이며 레벨 3 이상의 자율주행기술은 개발이 진행되고 있을 뿐, 아직은 공식적으로 실용화 단계까지 도달하지 못하고 있는 상황이다. 또한 레벨 5의 자율주행자동차는 운영설계영역이 무제한이므로 단기간의 실현은 불가능하다. 따라서 현재 상황에서의 기술개발 및 안전성 확보의 주요 타겟은 레벨 2~레벨 4이며, 특히 레벨 2 및 레벨 3에 우선순위를 두어야 한다.
미국 자율주행자동차 안전기준
미국 자율주행자동차 가이드라인
| 제목 | Federal Automated Vehicle Policy |
|---|---|
| 공표일 | 2016. 9. 20 |
| 목적 | 자율주행자동차 관련 “기술혁신”과 “국민안전” 두 마리 토끼를 잡기 위함(미 교통부 장관 曰) |
| 의미 | 강제 규정은 아니지만, 세계 최초의 정부차원의 지침 |
| No | 항목명 | |
|---|---|---|
| (1) | Registration and Certification | 등록 및 인증 |
| (2) | Data Recording and Sharing | 데이터 기록 및 공유 |
| (3) | Post-Crash Behavior | 충돌 후 자율주행 기능 유지 |
| (4) | Privacy | 개인정보 보호 |
| (5) | System Safety | 시스템 안전(설계 강건성 등) |
| (6) | Vehicle Cybersecurity | 사이버보안 |
| (7) | Human Machine Interface | 인간-기계 상호작용(정보전달) |
| (8) | Crashworthiness | 충돌 안전성(탑승자 보호) |
| (9) | Consumer Education and Training | 소비자 교육 및 훈련 |
| (10) | Ethical Consideration | 윤리적 고려(윤리적 딜레마) |
| (11) | Federal, State and Local Laws | 연방, 주, 지방법 준수 여부 |
| (12) | Operational Design Domain | 작동하는 영역 |
| (13) | Object and Event Detection and Response | 사물 인지 및 반응 기능 |
| (14) | Fall Back(Minimal Risk Condition) | 고장 발생시 대응능력 |
| (15) | Validation Method | 검증 방법 |
<표 1> 자율주행자동차의 안전점검지침 15항목(미국 자율주행자동차 가이드라인)
미국 자율주행자동차 안전기준 미국 연방도로교통안전청(NHTSA)에서는 전세계 최초로 자율주행자동차 가이드라인(Federal Automated Vehicle Policy)을 발표하였다(’16.9). 이 가이드라인의 목표는 자율주행자동차 관련 ‘기술혁신’과 ‘국민안전’이라는 두 마리 토끼를 잡기 위함이다. 비록 강제 규정은 아니었지만 세계 최초의 정부차원의 지침으로 전 세계에 영향력을 미치게 되었다. 주요 내용으로는 (1) 자율주행자동차의 총 15가지 안전점검지침 마련, (2) 각 주(州)마다 다른 자율주행자동차 정책 통일방안 제시, (3) 현(現)규제를 자율주행자동차에 변형 적용하는 방안 제시, (4) 새로운 도입이 필요한 자율주행자동차 규제 방안 제시 등이다. 특히, 이 가이드라인을 발표하면서 미국 정부가 자율주행 기술레벨을 SAE J3016에서 제시한 레벨 0 ~ 레벨 5(6단계)와 공식적으로 조화시켰다.
미국 연방도로교통안전청은 이어서 지난 ’16년 발표한 가이드라인의 개정본인 Automated Driving System 'A Vision for Safety'를 추가로 발표하였다(’17.9). 이 개정본의 취지는 자율주행기술 도입을 막는 규제에 해당되는 내용 삭제, 정부 및 민간 부분 협력과 소통 장려 등이다. 주요 개정 내용은 안전점검지침 평가결과 제출 의무화 폐지, 개정 가이드라인에 대한 제작자의 자발적 안전성 평가 권고 등이며, 기존 가이드라인의 안전점검지침 15가지 항목 중에서 ‘윤리적 고려’, ‘프라이버시’, ‘등록 및 인증’ 항목을 삭제하고 ‘데이터 수집 및 공유’ 항목에서 ‘공유’ 관련 내용을 삭제하여 12가지 항목으로 감소된 것이 특징이다.
미국 자율주행자동차 가이드라인 개정본

| 제목 | Automated Driving System “A Vision for Safety” |
|---|---|
| 공표일 | 2017. 9. 12 |
| 목적 | 비 규제적인 측면으로 자율주행기술의 안전성 확보 |
| 의미 | 업계의 자율에 따른 안전성 평가를 권고함으로서 규제로 인한 자율주행기술 개발 도입 지연을 방지 |
| 비교 | 기존 버전(V1.0) | 개정 버전(V2.0) |
|---|---|---|
| 제목 | Federal Automated Vehicle Policy | Automated Driving System “A Vision for Safety” |
| 용어 | HAV(Highly Automated Vehicle) | ADS(Automated Driving System)** SAE J3061 사용 용어로 변경 |
| 목적 | 자율주행자동차 관련 “기술혁신”과 “국민안전”두 마리 토끼를 잡기 위함 | 비 규제적인 측면에서 ADS의 “안전성”, “이동성”, “효율성” 확보를 위함 |
| 안정성 평가서 | Safety Assesment Letter 시험과 배치 전 평가서 제출 의무 | Voluntary Safety Self-Assessment 시험과 평가를 권장하나, 자발적 평가 |
| 안전성 평가 항목 | 데이터 기록 및 공유, 충돌 후 거동, 시스템 안전, 사이버보안, HMI, 충돌 안전성, 소비자 교육 및 훈련, 연방, 주, 지방법 준수, 운영설계영역, 사물 인지 및 반응 기능, 고장 발생시 대응능력, 검증 방법, 윤리적 고려, 개인정보 보호, 등록 및 인증 | 데이터 기록, 충돌 후 거동, 시스템 안전, 사이버보안, HMI, 충돌 안전성, 소비자 교육 및 훈련, 연방, 주, 지방법 준수, 운영설계영역, 사물 인지 및 반응 기능, 고장 발생시 대응능력, 검증 방법 |
| 적용차량 | SAE 자동화 레벨 2 ~ 5단계 차량 | SAE 자동화 레벨 3 ~ 5단계 차량 |
| 적용차종 | 승용차, 트럭 및 버스 등 모든 차종 | 승용차, 트럭과 버스 등 모든 차종 |
| 가이드라인 구성 |
1) 안전점검 지침 2) 각 주마다 다른 정책의 통일 방안 3) 현 규제를 적용 방안 4) 신규 도입이 필요한 규제 방안 |
1) 자동화된 시스템을 위한 자율적 가이던스 2) 주정부를 위한 기술적 지원 가이드라인 ※ 규제와 관련된 내용 삭제 |
| 주요 내용 | 하원 입법(안) | 상원 입법(안) |
|---|---|---|
| 법안 명 | Self Drive Act | AV Start Act |
| 진행 현황 | 하원 만장일치 통과(`17.9.6) | 상원 위원회 검토 中 |
| 적용 대상 | 승용차 | 승용차, 상용차 |
| 안전성 평가 보고서 | Safety Assessment Certification | Safety Evaluation Report *판매 90일전 교통부 제출 |
| 안전성 평가 항목 | Safety Assessment Certification | Safety Evaluation Report *판매 90일전 교통부 제출 |
| 안전성 평가 항목 | 하위 법령에서 추후 검토 | 9가지 항목 시스템 안전, 데이터 기록, 사이버 보안, HMI, 충돌안전성, 자율주행기능, 충돌 후 거동, 관련 법 준수, 운영설계영역 |
| 면제 규정 | 최대 4년, 10만대 충돌기준 만족, 조향장치 필수 | 최대 5년, 10만대 요구사항 없음 |
| 사이버보안 | 적용 대상: 레벨 2이상 차량 보안 계획 수립 *미준수 시 미국 內 판매 금지 | 적용 대상 : 레벨 3이상 차량 보안 계획 수립, 취약점에 대한 자발적 정보 교환 |
| 개인정보보호 | 레벨 2이상 차량 *미준수 시 FCC “개인정보보호법” 위반으로 간주 | 해당 내용 없음 |
| 자문위원회 | NHTSA에 자문위원회 설치 | NHTSA에 자문위원회 설치 |
| 소비자 교육 | 해당 내용 없음 | 소비자 교육 실무 그룹 조성 |
| 차량관리 | 연방정부에 서류 제출 *기관이름, 주소, 기능설명, 보험증서 |
해당 내용 없음 |
<표 2> 미국 의회의 자율주행자동차 관련 법안
한편, 미국 의회는 자율주행자동차의 상용화 촉진을 위한 연방차원의 법안의 입법 절차를 진행 중에 있다. 하원 입법안(H.R 3388 ‘Self Drive Act')과 상원 입법안(S 1885 'AV Start Act')으로 구성되는 법안의 의미는 주(州)정부의 법안보다 우선됨을 명시함으로서 연방정부 차원의 통일된 정책개발방향을 공표하고, 자유로운 시험과 연구를 위한 허가 조건 완화 및 면제 기준 확대를 통한 연방정부 차원의 자율주행기술 개발 의지를 표명한 것이다. 본 법안은 하원 위원회를 만장일치로 통과(’17.9.6)하고 현재 상원 위원회에서 검토 중에 있다. 그러나 법안 주요 내용이 규제금지, 미국 자동차안전기준(FMVSS)의 면제 확대 및 제작자의 안전성 평가 보고서 제출 등 기술개발 촉진에 초점이 맞추어져 있기 때문에 최근 발생한 우버 자율주행자동차 사고로 인하여 안전 및 규제 강화를 주장하는 목소리가 더욱 힘을 얻을 것으로 예상된다.
UN 자율주행자동차 안전기준
자동차 관련 국제기준(UN Regulation)을 제정하는 UN/ECE/WP29와 자동차도로 운행 규약을 제정하는 UN/ECE/WP1에서는 자율주행자동차 관련 기준 제·개정을 위한 노력을 활발히 진행하고 있다. 특히, 자동차 관련 분야인 WP29에서는 ITS/AD(Intelligent Transportation System/Automated Driving) 및 ACSF(Automatically Commended Steering Function) Informal Group을 결성하여 자율주행자동차 관련 국제기준을 논의하고 있다. IG-ITS/AD의 경우 WP29 총회 산하 Informal Group으로 2014년 12월에 결성되어 자율주행자동차의 기술단계 정의 등 본격적인 활동을 시작하였다. IG-ACSF의 경우 WP29내 주행·제동 전문가그룹(GRRF) 산하 Informal Group으로 자동명령조향기능(ACSF)과 관련된 안전기준 및 평가방법 등을 논의하고 있다.
그간의 주요 활동내역 중 자율주행자동차의 사이버보안 및 소프트웨어 업데이트 관련해 UN/ECE/WP29 제170차 총회(’16.11), 제10차 ITS-AD 전문가기술회의에서 자율주행자동차 사이버보안 및 정보보안 가이드라인 초안이 확정되었다. 이후 제173차 총회(’17.11)에서는 자율주행자동차의 e-Security 및 소프트웨어 업데이트와 관련하여 우선적으로 지침서를 개발하고, 향후 형식승인 및 확인을 위한 기준은 국제기준으로 제정하기로 합의되었다. 세부내용으로는 사이버 위협의 종류와 해결방안에 대한 지침서 초안이 완료되었고, 소프트웨어 업데이트 지침서의 초안 구조 및 내용이 완료되었다.

<그림 2> UN/ECE/WP29의 ITs/AD 및 ACsF 체계도
UN/ECE/WP29 제172차 총회(’17.6)에서는 자율주행자동차의 기술단계별 정의를 서술하는 표에서 ‘실제 사용 예(Use case)’라는 표현을 ‘법제화가 가능한 조작적 정의(Operational Domain Design, ODD)'로 변경하여 각 단계별 기술에 대한 안전기준 수립 시 체계화 될 수 있도록 하였다. 또한 현재 ITS-AD의 주요 논의 범위는 레벨 2로서, 향후 레벨3 및 레벨4로의 확장이 제기되었다.
최근 개최된 UN/ECE/WP29 제174차 정기총회(’18.3)에서는 자율주행자동차 신규 전문분과(GRAV, 가칭) 추진과 관련하여 단기적으로는 주행·제동 전문분과(GRRF)에서 자율주행자동차 관련 논의를 우선 진행하고, 향후 중·장기적으로 신규 전문분과(GRAV) 신설을 추진하는 방향으로 합의되었다.
총회 기간내에 개최된 제14차 ITS-AD 전문가기술회의(’18.3.15)에서는 자율주행자동차 관련 의미 있는 진전이 있었다. 첫 번째 주요결과는 UN의 국제기준 제정을 위한 자율주행 기술단계별 정의가 확정되어 최종 채택되었다는 것이다. UN의 자율주행자동차의 기술단계별 정의는 기본적으로 SAE J3016의 레벨을 준용했으나, 레벨 0의 정의에서 제외한 부분과 각 기술단계별로 운전자, 자율주행자동차 등의 의무를 명시하고 안전기준 고려사항을 추가한 점이 주요 차이점이다. 특히 기존 SAE J3016에서는 레벨 3에서 운전자가 제어권을 받지 않으면 일정 시간 경과 후 자율주행시스템이 자동해제되어 다소 위험성을 내포하고 있었으나, UN의 자율주행 정의에서는 레벨 3에서 운전자가 제어권을 받지 않으면 자율주행자동차가 자동으로 최소위험조건(Minimal Risk Condition)을 수행하도록 명시되어 있기 때문에 안전기준 측면에서 확실히 탑승자(운전자 포함)의 보호개념이 포함되어 있다.
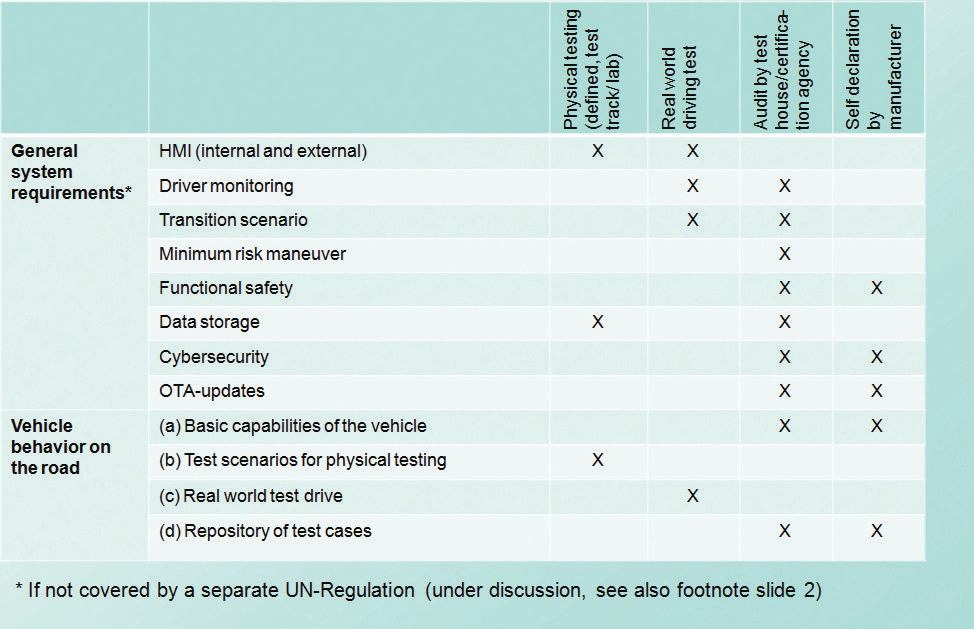
<그림 3> UN 안전기준의 자율주행자동차 평가항목 및 평가방법(UN/ECE/WP29/ITs-AD-14-07)
두 번째 주요결과는 주행시험장 기반 기능시험의 한계를 극복하고자 형식승인 및 자기인증제도 하에서 자율주행자동차의 안전성을 검증하기위한 평가 전담반(Task Force, TF)이 구성되었다는 점이다. 자율주행자동차 평가 TF에서 구상중인 자율주행자동차 안전성 평가방법은 ‘실 차 인증시험’, ‘실 도로환경기반 검증시험’, ‘적합성 심사’ 이렇게 총 3가지의 카테고리로 구성되어 있으며, 2개의 서브그룹(①실차인증시험 및 적합성 심사, ②실도로환경기반 실차검증시험)으로 구성되어 있다. Kick-off 회의(’18.3.28)는 프랑스 교통부에서 개최 예정되어 있으며 국내에서는 한국교통안전공단 자동차안전연구원이 참석한다. 향후 자율주행자동차의 국내 안전기준 마련을 위해서는 본 TF 회의에 전략적으로 대응할 필요가 있다.
세 번째 주요결과는 UN 세계기술기준 신규 개발 추진 항목으로 자율주행자동차 관련 사고기록장치(EDR) 및 운전자 가용 인지(Driver Availability Recognition)가 우선적으로 언급되었다는 점이다. 특히, 기존의 사고데이터기록장치(EDR, Event Date Recorder)와 자율주행자동차를 위한 데이터저장시스템(DSSAS, Data Storage System for Automated Driving)의 기준을 독립적으로 개발(GRB 및 GRRF에서 각각 논의)하기로 합의된 것이 의미가 있으며, 운전자 가용 인지가 선정된 배경은 자율주행 상황에서 운전자 모니터링의 필요성을 의미한다. 참고로 UN 세계기술기준 신규 개발을 위한 추진 항목으로 거론된 총 7가지 후보항목은(①자율주행자동차(Autonomous Vehicle), ②사이버보안(Cyber security, ③긴급비상제동장치(AEBS), ④차선유지지원장치(LKAS), ⑤자율주행자동차 사고기록장치(Event Data Recorders, ⑥자동순항장치(ACC), ⑦자율주행자동차 운전자 가용 인지(Driver Availability Recognition)) 등이다.
우리나라 자율주행자동차 안전기준
우리나라는 ’15년부터 범부처 정부차원의 ‘자율주행차 상용화 지원방안’을 수립하여 추진하고 있다. ’20년 고속도로 3단계 자율주행 상용화를 목표로 ①제도정비, ②인프라 확충, ③기술개발 지원의 3대 추진과제를 실행 중에 있다. 특히 국토교통부는 제도정비 및 인프라 확충 분야에 집중하고 있다. ’16년에는 ‘자율주행차 규제혁신방안’을 마련하여 추가 규제를 완화하였다. 그 결과 글로벌 수준의 규제완화가 이루어져 기술개발의 기반이 마련되었고, 자율주행 임시운행 허가제도(’16.2)를 통해서 기술개발을 촉진시켜왔다.
또한, 국토교통부는 제168차 UN/ECE/WP29 정기총회(’16.3)에 참석하여 자율주행자동차 상용화를 위한 정부차원의 중장기 지원 정책을 발표하고, 국내 관련 부처의 의견 전달 및 관련 연구 수행 등 자율주행자동차 국제기준 개발 및 관련 논의에 적극 참여할 것임을 밝히는 등 국제기준 선도를 위한 지속적인 노력을 기울이고 있다. 한편, 국토교통부로부터 자동차안전기준 국제조화 전담기관으로 지정(’17.12)된 한국교통안전공단 자동차안전연구원은 UN 유럽 본부가 있고 UN/ECE/WP29 총회가 열리는 스위스 제네바에 국외사무소(Korea Internationalization Center for Automobile Standard, KICAS)를 개설(’18.2)하여 현지에서 직접 UN 안전기준 제·개정 논의에 적극 참여하고, 최신 자동차 국제 정책과 산업 동향을 파악하여 국내 기술개발을 이끌기 위한 국제 협력을 강화하고 있다.
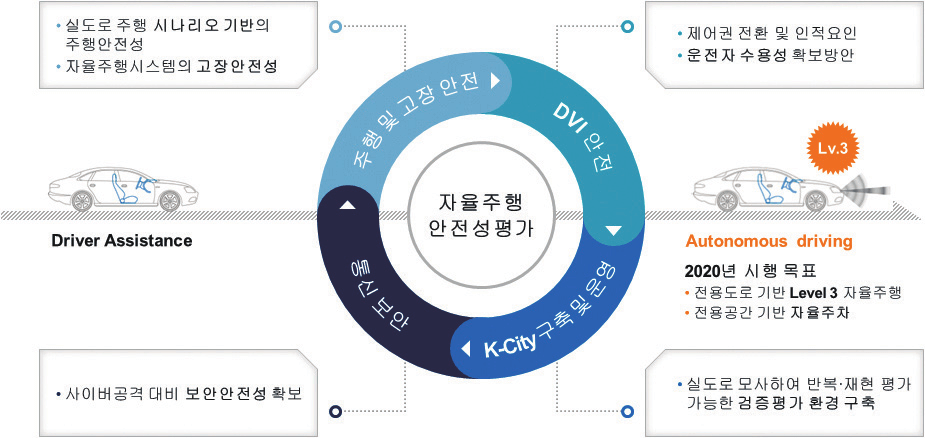
<그림 4> 자율주행자동차 3대 핵심 안전성
국토교통부 및 한국교통안전공단 자동차안전연구원은 국토교통과학기술진흥원과 함께 자율주행자동차의 안전성 강화를 위하여 안전기준 개발을 목표로 ‘자율주행자동차 3대(주행·고장, 통신·보안, 제어권전환) 핵심 안전성' R&D를 수행 중에 있다. 본 R&D를 바탕으로 금년말 자율주행자동차의 안전기준 초안을 도출하고 ’19년에는 자동차관리법 정비 및 안전기준을 마련할 예정이며 UN 국제기준 제정 시 국내기준과 조화를 병행시켜가면서 추진할 예정이다.
결론 및 제언
자율주행자동차 관련 기술의 출발은 비록 다소 늦었으나, 여러 주(州)로 구성되어 있는 미국이나, 모든 정책결정에 회원국의 동의를 얻어야 하는 유럽 연합(EU)에 비해 우리나라는 신속한 정책결정과 강력한 추진력을 갖추고 있다는 장점이 있다. 또한 지금까지는 자율주행자동차의 상용화를 촉진시키기 위해서 규제 완화 및 기술개발 장려를 위한 정책들이 주로 추진되어 왔다. 그러나 자율주행자동차가 가져다 줄 달콤한 혜택들은 안전성이 보장된 상태에서만 누릴 수 있는 것이다. 이제는 기술개발과 함께 안전기준을 준비할 때이다. 단, 기술은 타협할 수 있지만 안전은 타협대상이 아니라는 점이 다를 뿐이다. 미국도 자율주행자동차의 규제완화 및 기술개발 촉진을 주요 내용으로 가이드라인을 제시하고 법안을 의회에 제출했지만 최근 우버의 사고를 기점으로 분위기가 반전될 수 있으며, 그간 자율주행자동차의 기능 위주로 접근했던 UN도 최근 자율주행에 대한 정의를 수립하고 안전성 평가를 위한 기준제정을 목적으로 본격적으로 움직이기 시작했다. 우리도 자율주행자동차의 안전성 확보를 위한 안전기준 수립에 보다 적극적으로 대응해야 할 때이다.

또한 지금의 자율주행기술은 대부분 자율주행시스템이 장착된 자동차 단독으로 주행하는 소위 독립방식(Stand alone)으로 진행되고 있으며, 기술개발의 단계상 레벨3의 자동차전용도로 주행이 먼저 시도되고 있다. 자동차전용도로에서 시속 100km로 주행한다면 가정해보면, 1초당 약 28m씩 주행하게 된다. 현재 UN(ACSF)에서는 자율주행자동차의 제어권 전환 시간을 약 4초 남짓으로 논의 중에 있는데, 이러한 현재의 센서 기술로는 4초조차 버티기 힘든 상황이다. 따라서 향후에는 차대차, 차대 인프라 등과 상호 협력하여 교통정보를 제공받는 ‘자율협력주행’으로의 발전이 필요하다. 물론 자율협력주행의 주요 목적은 ‘기술 한계 극복’이겠지만, 그 기술 한계 극복의 궁극적인 목표는 탑승자(운전자)의 안전이다.